Aquest projecte consisteix en controlar un robot des de una aplicació.
Per el moment hem começat la base y el diseny de com serà en un futur.

Aquest projecte consisteix en controlar un robot des de una aplicació.
Per el moment hem começat la base y el diseny de com serà en un futur.
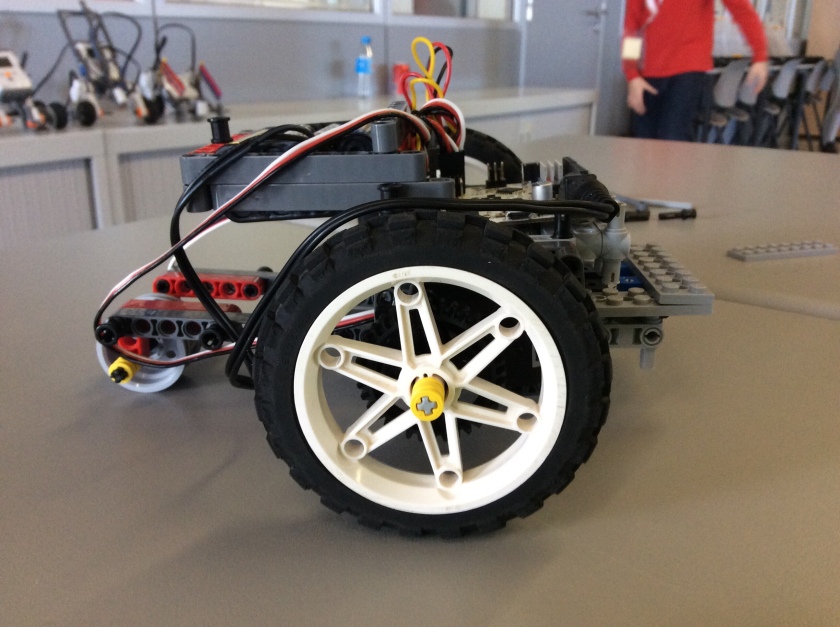
Avui canviarem les rodes, ja que no les vam posar del tot bé i es queien, acabarem de calibrar els sensors i provarem si funciona, per poder fer les modificacions. També farem proves esperant que segueixi la linia avui.
W
Avui hem canviat els cargols de les rodes, ja que xocaven amb els motors i es surtien. També hem revisat la programació, perquè hi havien petits errors com «;» i «()», però ja està solucionat, ara només falta provar la programació.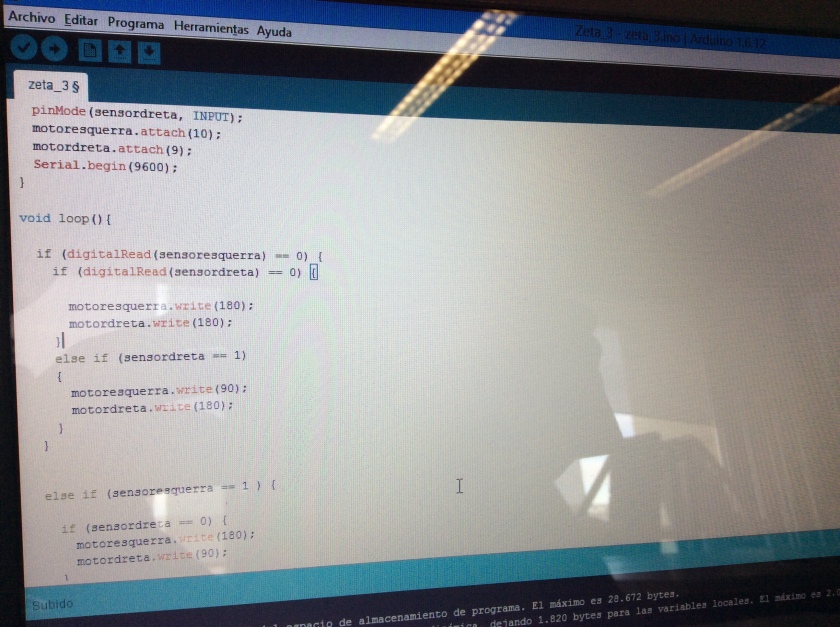
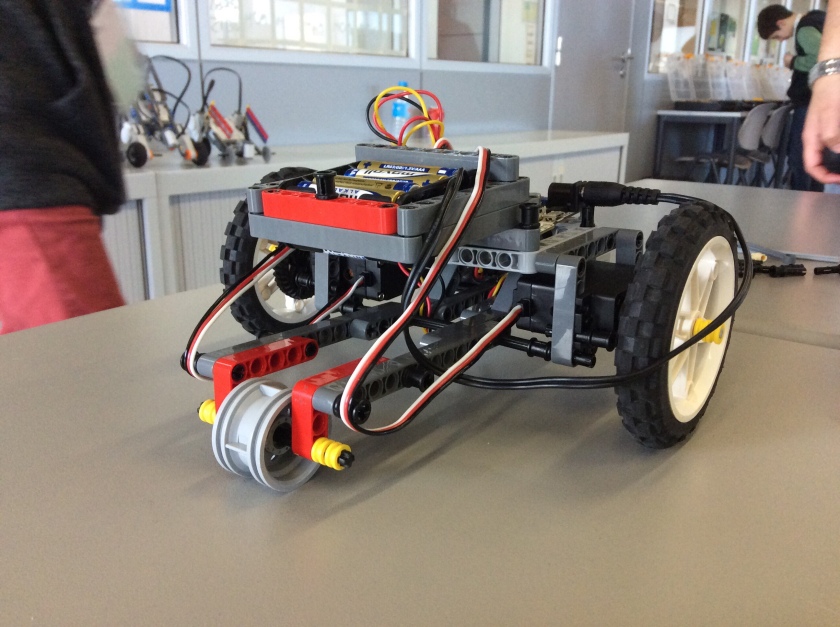
Aqui está el nostre robot definitiu.
Hem calibrar sensors i motors ara ja només fer una vegada
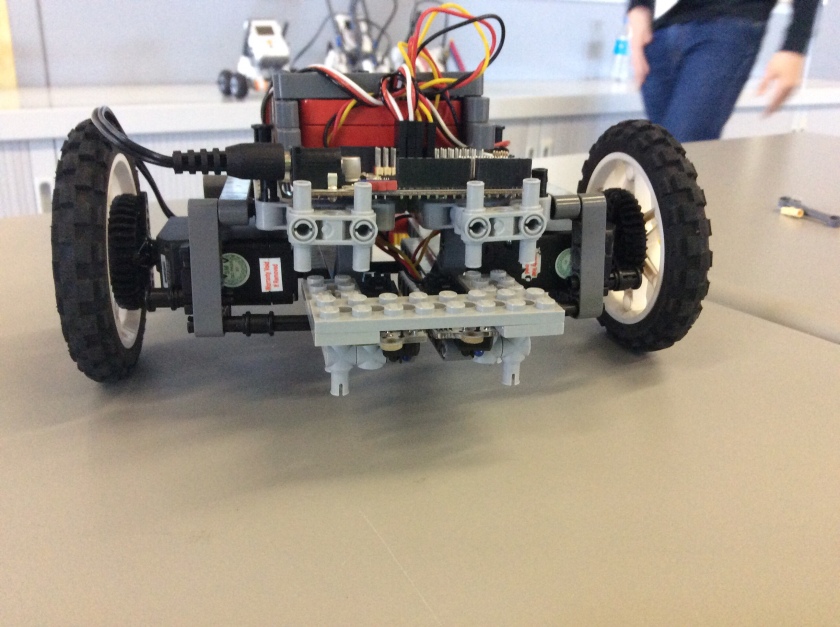

Hem començat a construir el robot amb dos motors iun sensor de llum, ja que anem a fer fer un seguidor de linees. Hem trobat dificultats a l’hora de posar la bateria i la placa.
Video final:
Els botons hexagonals funcionen normals, osigui:
Botó apretat = 1
Botó sense apretar = 0
En canvi el botó rectangular funciona el revés:
Botó apretat = 0
Botó sense apretar = 1
Per fer cada botó s’ha de posar:
If(digitalRead(botó)==1){
digitalWrite(LED,HIGH);
delay(500)
digitalWrite(LED,LOW);
delay(500);
}
Botó esquerre = intermitent esquerre
Botó dret = intermitent dret
3 botó = stop
Rapid!!! Ahhhhhhh!!!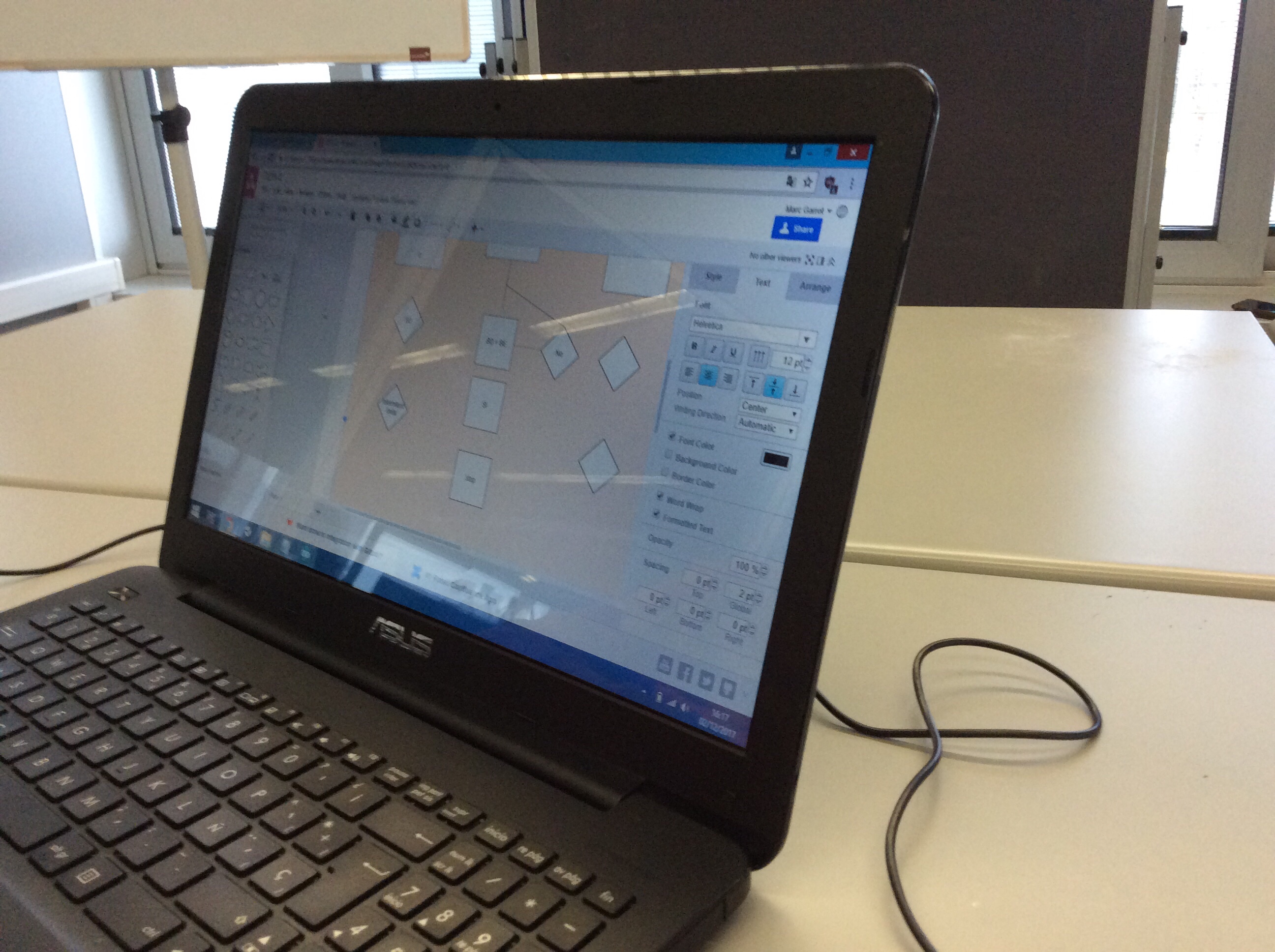
Estem fent un diagrama per organitzar-nos millor.
Ferem un prototip de roba inteligent.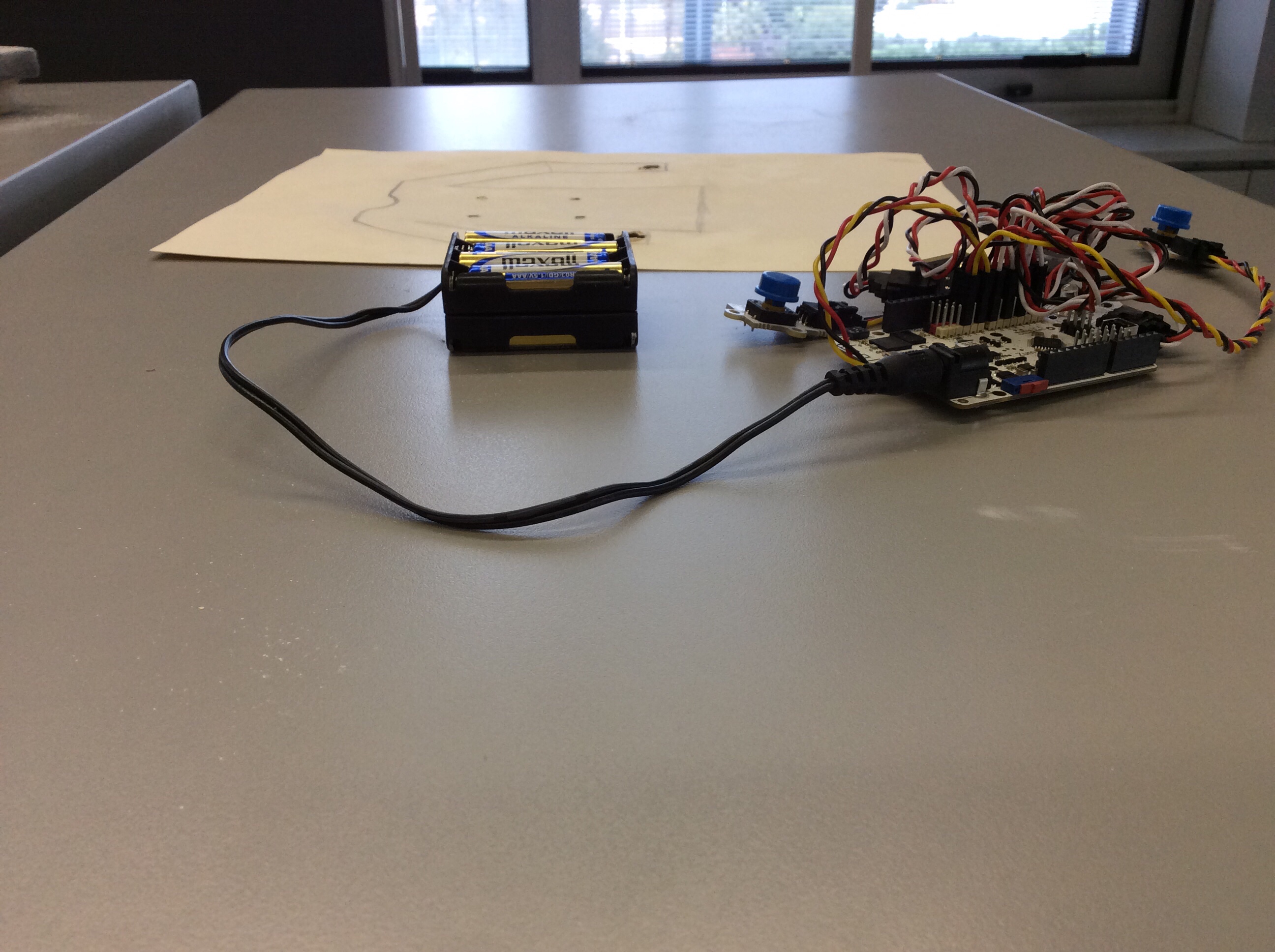
Empezamos con el dibujo
Speed 100
